��
��
|
��ֱ�����ǿ�ų��ڴų������л���ʲô���ţ�������ڲ���z��ų���ͬʱ������10��50G��x�᷽��Ĵų�����ô�죿
|
��
��
��
|
�����Ų��������������ų���СΪ15��˹��5��15��˹��������ų�������Ӱ��������������ܡ����������û��ת������λ/��λģʽ�����������ﵽ10��15����1��˹�����ڣ������ʹ������λ/��λģʽ���������������С��1����
���ǵ����ʹ������� HMC1021��HMC1022
���ܵ���������Ӱ�콫���С������λ/��λģʽ�·�������С��1����
ʹ��˵��(#AN-205)������HMC1001/1002������ЧӦ�� |
 |
��
��
|
�������Ƿ�����ڵشų�Ӱ������������ȵ���ҹ���죿
|
��
��
��
|
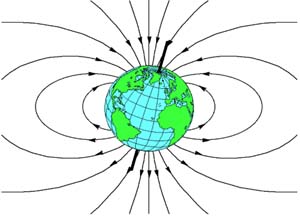
���ᡣ������������û����ҹ���죬�شű���Ҳû�ж�����ҹ���졣�شų�ǿ�ȴ�ԼΪ500����˹�����ǵĴ��������Լ�0.04��0.07����˹�Ĵų���HMC2003
Ϊ40����˹, HMR2300Ϊ 70����˹�� |
|
|
��
��
|
�����Խ��ʸ���ʹ��ʱӦ������������Ӱ�죿
|
��
��
��
|
���Խ��ʣ������ϻ�ǯ���Ĵ��ڽ������յشų�����ɲ������š���ʹ��������صģ��������κεĴ������϶��ᷢ�����������н�������ġ�
F���磬������ЧӦ�У�����װһ����У���ơ������������װ�ڹ̶���λ�ã���ô�ͻ����ӻ���پ�ЧӦ���Ӷ�����ƫ�á�
A�����һ�ַ�����ʹ��һ����ͨ�˹�Ƭ�������Կ��ٵ���ʾ���仯������������һ�������ʻ��С�����شų���Ӱ����һֱ���ڵģ�����������һ�㲢����������Ƿdz���Ҫ�ġ����ǵĴ��������Լ�����ȷ�ĵشų���ֵ��
|
|
|
��
��
|
�ڷ��������������Χ���Ƿ������ܻ��ܵ�Ӱ�죿
|
��
��
��
|
�ǵģ��綯�������Ĵų��ḽ�ӵ��شų��С������������Щ�ų���Ϊһ��������в�����������������õ��ӹ����豸�������֣���Ϊ�ش���ֱ������̬���ģ����綯���ų��ǽ��������ġ���ʵ�ϣ�HMR2300�Ĺ�������������50/60Hz�ų���Ӱ�졣�����Խ���ͬ�������յشų���ʹ�ôų��������ı䡣
|
|
|
��
��
|
����������ڴ���������������ֱ�ӻ��У�����ʲôӰ���أ�����Դų�����û��Ӱ��
|
��
��
��
|
����������ڴ�����������Դų�����û��Ӱ�졣�⽫�Գ�������Ӱ�죬�����������ġ�����ʻ��������ʱ��Ȼ���Ա�����ֻ����һ�������ϵIJ�ͬ��
|
|
|
��
��
|
�˶��ij����ϴ��������Զ���Σ��Ƿ�Գ������ٶ�Ҫ��ʲô���ƣ�
|
��
��
��
|
��װ�ڳ����ϵĴ�������ʹ�شų��������䡣���ֻ�����Ա����ɵ�У����ֻҪ���ó��Ƽ���Ȧ�Ϳ����ˡ��Գ������ٶ�û�����ƣ��ų����������ᱻ�˶��ͼ��ٶ�Ӱ�죭����ȫ�ǹ�̬�ġ� |
|
|
��
��
|
Ŀǰ�г��ϵ�AGVs(�Զ����г���)ʹ������ϵͳ�����˶��������ݱȴų��������۸�ߵö࣬�������ʲôԭ����
|
��
��
��
|
�����DZ��ķ���ָʾϵͳ����Ϊ�����Լ��ܶ���������������������ת�����ݵ���������������ʱ�����ƫ�ơ����ǵĴų����������Էdz��õļ���ת��ƫת��λ�ǣ��Ҳ�����ʱ�����ƫ�ƣ������ᱻ�κγ��������Խ���Ӱ�졣����������Ӱ����Լĵõ�У���������� |
|
|
��
��
|
�����һ�Ĵ�������Ϊ ��ͨ�������ʹ�ã��Ƿ���Ҫһֱʹ�����ͬ���Ĵų������£�
|
��
��
��
|
����Ҫ����û�б�Ҫ��������һֱ����һ���������籱��������ʵ������ϣ�������ų����������ڳ���ʻ����ʱ�����������Ӧ�� |
|
|
��
��
|
������������Ҫ��ʲô��Χ�ڣ�
|
��
��
��
|
������������ǡ�������ǿ�����20��30Ӣ�ߵľ���������Ĵ����ԡ� |
|
|
��
��
|
�����ߴ�Դ�������ʲôӰ�죿�������Ƿ���Զ����Ž���Ŀ����˶�����������ӳ��
|
��
��
��
|
������ʻ��ʱ��ߴ������������ͳ���ʱ�����Ӱ�졣Ħ�г��ڼ�������ֻ��һ��С�㣬��18�ִ��dz����Ρ���ʾ��Ĵ�С���ɳ��������Խ��ʣ������֣����ȣ��ijߴ�����ġ�
|
|
|
��
��
|
��Y��0 �� Z��0
�������²����ų���+X������ֵ��ʱ�������������ѣ���ϵͳX����ת180��ͬʱ����Y��0��Z��0�������������ֻ�У�0.8��Ӧ���ǣ�1��������X��0��Z��0ʱY����ֵʱ��+Y=+0.9��
-Y=-1���Լ�ͬ������Z����ֵʱ���ݶ���ͬ������Լ��10%��20%��
|
��
��
��
|
���������������·������ƫ�ó����ͣ��ͽ������ư�װ�ڳ����ϵ����һ�¡��������������������������ϵ������豸������һ��ƫ�ó���
|
|
|
��
��
|
���������������㽨�����У��ϵͳ��
|
��
��
��
|
�ǵġ�һ�ַ����ǽ��豸ת��һȦ�ټ���ƫ��ʸ�������ɴ�������ص���
(0,0) Ϊ�е��Բ�ڣ��ڽ������Ķ����л�ʹ������ƫ��ʸ��������豸��������X,Yƽ������Ϊ����ʹ�ã���ô�ͽ��豸�ڹ���̨����ת360�� �������豸����ת��X��Y�����������һ�����Һ��������ߡ��������¼�����еĶ����������ǻ���X��Y�����ϣ���ô�Ϳ��Կ���һ��Բ��������Բ��������������£�Բ�Ļ�ƫ��ԭ��(0,0)��ƫ���������ɸ����������豸��������Ҫ��¼���ڴ��й��������ļ���ʹ�á��κ�һ���������㷽���X,Yʸ������Ҫ�ڴ��м�ȥ���ƫ��ʸ��������Ϊ�������̷��������
|
|
|
��
��
|
���������Ż�����Բ����شų��ж���Ӱ�죿
|
��
��
��
|
����������Ż�������������ָʾ�������һ��ƫ�ƴų����������Dz�������ƫת�����磫15������������Ѿ����Ż���������������һ��������������
������������ŵ���ų������ǵ���ų���Ȼ���ڣ���Щ�ų�������Եġ��������һ���ϴ�ij�����ô��С�ĵ���ų��ḽ�������棻��������Ʊ���װ�ڳ��ڣ������Լ�ͨ��У������������Ӱ�졣 |
|
|
��
��
|
PCB���ϵIJ�������ʲôӰ����������ʽ����?
|
��
��
��
|
�ǵģ������Ԫ�����������Բ��ϡ������������һ��������ͨ���ɵ�·�IJ�ͬ�㡣��������TO-5���Ӻ�TO-220��װ�����д���������
|
|
|
��
��
|
�ҵ�ϵͳ��û���κλ����Ӱ��Ľ������������Ǹ�������һ���������ų���������ʲô������
|
��
��
��
|
������������Ԫ�����̾�������������ƫ�ƴų�ʸ���� |
|
|
��
��
|
�����ʹ����λ&��λ��·���Ƿ�Ҫ�����������ߣ��͵���λ&��λ�������ԼΪ3��4���࣬���Ƿ��ã��Ƿ���Ҫ�������ֵ����ʲô������
|
��
��
��
|
��λ&��λ���岻���Сƫ�Ƴ���Ӱ�졣���ǿ��Լ����¶�Ư��ЧӦ��������Զȣ��ظ����Լ�����ЧӦ��������ܡ� |
|
|
��
��
|
HMC1002��HMC2003֮���������ʲô���Լ���ο��Dz���ʲô�ͺţ� |
��
��
��
|
HMC1002ֻ��һ����δ�Ŵ������ѹ����ļ�MR��������HMC2003��������Ŵ�������
�ڴ�����Ӧ�ã��Զ����̣�������ʵ�����û�����HMC1002�����Զ�����װ���̣����Ҿ���ʵ�ݡ�HMC1002��Ҫ��ȷ�ĵ����Լ���Ӧ��˵���ᵽ����λ&��λ��·�Խ�����Ӻ�����ߵ�����ˮƽ��������Щ����ʹ֮����A/Dת��������Ϳ�����ֱ�Ӽ��ݡ�
����û��ļ��������������������ᵽ��HMC1002��Ҫ��֧�֣���ô���ǾͻṺ��HMC2003������Ҫ�ṩ�Զ�����װ���̡�HMC2003��ʡ����Ƴɱ���ʱ�䣬�����˷��գ�������װ����Ʒԭ����ȥ����ֱ��ʹ�á������κ�֧��HMC2003�Ϳ�������A/Dת��������Ϳ�����ֱ�Ӽ���HMC2003�������ѹ��Լ��2.5V���¡� |
|
|
��
��
|
HMC2003�Ƿ���Ҫ���¶Ƚ��е���У�����������ṩһ����Ӧ�ã����ԱȽϳ�ÿ���豸��Ҫʲô���ĵ���֧�ֺ������
|
��
��
��
|
��HMC2003���ö��¶Ƚ��е���У��������ȫ��̬�Ļ����ƣ�û�д���У��ϵ�����ڴ档�¶ȵľ�ȷ���ǿ��Ա�֤�ģ���Ϊ���ǵ���ƾ�ʹ�����������ǵIJ���˵���� |
|
|
��
��
|
HMC2003������ɷ����������豸��ƫ���ʣ�
|
��
��
��
|
�����豸��ƫ���ʿ����������ṩ�Ĵų���������ã�
���ǵĴ������ֱ�����40��70����˹���в�Ʒ�ͺž������������ṩ40����˹�ķֱ�����Ϊ�����ģ���ѹ��HMC2003�������ṩ70����˹�ķֱ�����Ϊ���ֵ������ʽ����RS-232
��RS-485��
��HMC2003�������λ�Ǻ��ڵ��͵Ĵ�ֱ�شų�(300����˹)�еĽ�λ�ƿ�������ʽ������
0.01 �� = arcTan(70 ����˹/300 ����˹)
���̵ľ�ȷ������Ӳ/����������б�ʺ���ǡ����ǵ������Ѿ�֤����б��70��DIP�Ǵﵽ80�ȵ�ʹ���о���+/-0.5�ȵľ�ȷ�ȡ�
HMC2003�ж����ƺ�ASCII���������ʽ���������£�X,Y,Z����ֵ��ʹ��һ��16-bit���֣�+/-30,000��ʾ+/-
2 ��˹��ǿ����ASCII��ʽ���������ǿ���PC����Ļ�϶��������Ƶ�ʿ�����10��154 ��/�� ��ѡ�� |
|
|
��
��
|
HMC1022���ݱ�����ʾVcc = 5�� 8 VDC, min. ��λ��ѹ3.0 V,ʹ��һ��3VDC�����ΪVcc�Ƿ��ܣ�
|
��
��
��
|
��������Vcc��ʹ��3V��ѹ����������ȷ�Ⱥͳ�ǿ��Χ������ı䣬ֻ���źŴ�С��ɱ����ļ�С��
|
|
|
��
��
|
����AN-201���ᵽ�Ĵ�������100��˹���´ų�ͬ�������͡�HMC2003���˵�ֱ���<70��˹��������˵����ô���⣿���������ʲô����Ӱ�죿HMC2003�����ʲô�̶ȵ�������HMC2003��HMC2300��ʵ�ķֱ��ʼ����Ƕ��٣�
|
��
��
��
|
�������ǵĴ��������Ǵ������ŵ�·�������������������dz�HMC2300Ϊ70����˹�������ⱻ16-bit
A/Dת�������ơ���60,000��A/D������к�Խ+/-2��˹������ÿ������67����˹��
HMC2003���Ŵ�Ԫ�����������ƣ�����������0.7microVolts p-p (0.1��10
Hz)���������롣��ͽ��ų��ֱ���������40����˹�� |
|
|
��
��
|
HMC2003������������?
|
��
��
��
|
HMC1001��HMC1002��������ѹ�ܶ���100Hz��Ϊ4.4nV/rt-Hz����1Hz��Ϊ30 nv/rt-Hz��������10����˹���ҵĴų��ֱ��ʡ����������Ϊ3.1mV/V/gauss��
|
|
|
��
��
|
����MR��������װ�ڰ���ʱ��û��ʲô���ƣ����ܻ��кܶ�Ľ�����������Ӱ�촫������Ԫ����
|
��
��
��
|
�ڰѴ�������װ����·����ʱ��һЩע������ƽ��������ʹ��ģ���ɵ�·Ӧ�þ��봫����1-2���ף����̫�������Ҵų�ЧӦ�ı�Ļ������̶����ͻ������ |
|
|
��
��
|
HMC1001�Ƿ��й���Ƶ�ʣ������������ƣ�
|
��
��
��
|
�ǵģ�1MHZ. |
|
|
��
��
|
ΪʲôHMC2003�����HMC1001��1002�Եú����������Ƿ��б�HMC2003��1KHz�������3-���豸������HMC1003��
|
��
��
��
|
����������ʹ�õķŴ�������ġ��豸amp��С�źŴ�����.7MHz�����ڴﵽ100khz��Ȼ���־�ȷ��������amp�����ڸ����Ĵ��������ǿ��Ե���HMC2003���ı�����һ����������ֵ����3dB�������ӵ�2kHz��Ҫ�õ�����Ĵ������Ի���Op
Amp�� |
|
|
��
��
|
��HMC1001��1002�����ݱ������ᵽ :
"����ƫ�õ�����(��ƫ�ƺ�ƫ��)�����Ͽ�����ÿ20mA����ͨ��ʱ����1 Oe�����ڲ������ϵij���"���������Ϊ��ͨ������һ���ض��ĵ�����ƫ�ƴ�����������ƫ���𣿻��ߵ��ṩ40mA������ʱ��õ�һ���ο�ƫ�ƣ�
|
��
��
��
|
�Ƽ�ʹ��Set/Reset��·������ƽ��������ġ����ӡ�����ƫ��...ƫ�ƴ��������ڼ������߲���һ���ⲿƫ�ó���ƫ�ƴ�������Ч�����ڱպϻ�·�����ִ�������������ƫ���¡�ƫ�ƴ��ġ���Ȧ��������Լ��50mA/��˹�� |
|
|
��
��
|
HMC1002�ڲ�оƬ�����������ģ��ο�оƬλ����ʲô�ط���
|
��
��
��
|
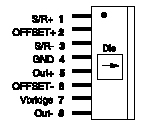
��HMC1002�ڲ�������MR����������20-pin SOIC��װ�ڲ����һ��ཻ���90�ȡ�HMC1002���ݱ����ĵ�һ������ͼƬ˵���� |




 HMC5843
�ں�HMC1043������贫�������Լ�����Ŵ�������ƫ��������12λADC���ܺ�һ��I2C�������߽ӿڵ�ASIC������Ӧ���������ߵ��ӡ������ֻ�����������ϵͳ�����˵���ϵͳ�ʹ����ơ�
HMC5843
�ں�HMC1043������贫�������Լ�����Ŵ�������ƫ��������12λADC���ܺ�һ��I2C�������߽ӿڵ�ASIC������Ӧ���������ߵ��ӡ������ֻ�����������ϵͳ�����˵���ϵͳ�ʹ����ơ�
 HMC6343��������ʽ�������������贫����������MEMS���ٶȴ��������������������㼰��б������Ӳ��У��������ֱֵ�������������Ϊһ������������ʽ���̷���������Ӧ�ð����������̵��ֻ���GPS���̵�����������⣬���߶�λ��
HMC6343��������ʽ�������������贫����������MEMS���ٶȴ��������������������㼰��б������Ӳ��У��������ֱֵ�������������Ϊһ������������ʽ���̷���������Ӧ�ð����������̵��ֻ���GPS���̵�����������⣬���߶�λ��

 HMC1002
��20-pin SOIC��װ��˫����贫�������ų���Χ��+/-2��˹���ֱ���Ϊ27��˹��������Ϊ3mV/V/��˹��������Ϊ˫�ᴫ����������HMC1001һ����Ϊ���ᴫ����ʹ�á�
HMC1002
��20-pin SOIC��װ��˫����贫�������ų���Χ��+/-2��˹���ֱ���Ϊ27��˹��������Ϊ3mV/V/��˹��������Ϊ˫�ᴫ����������HMC1001һ����Ϊ���ᴫ����ʹ�á�
 HMC1021S
��һ��8-pin
SOIC��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹�����ڵ��ᴫ�г��ϡ�
HMC1021S
��һ��8-pin
SOIC��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹�����ڵ��ᴫ�г��ϡ� HMC1021Z
��һ��8-pin
SIP��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹��������Ϊ���ᴫ����������HMC1022һ����Ϊ���ᴫ����ʹ�á�
HMC1021Z
��һ��8-pin
SIP��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹��������Ϊ���ᴫ����������HMC1022һ����Ϊ���ᴫ����ʹ�á� HMC1021D
��һ��8-pin
DIP��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹�����¼�����250�档
HMC1021D
��һ��8-pin
DIP��װ�ĵ�����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹�����¼�����250�档 HMC1022
��16-pin
SOIC��װ��˫����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹��������Ϊ˫�ᴫ����������HMC1021Zһ����Ϊ���ᴫ����ʹ�á�
HMC1022
��16-pin
SOIC��װ��˫����贫�������ų���Χ��+/-6��˹���ֱ���Ϊ85��˹��������Ϊ1mV/V/��˹��������Ϊ˫�ᴫ����������HMC1021Zһ����Ϊ���ᴫ����ʹ�á�


 HMC1051Z
ʵ������HMC1052�ĵ���汾��HMC1051Z�Ǵ�HMC1052�����ĵ��ŵ�·��Ϊ8-pin
SIP��װ��
HMC1051Z
ʵ������HMC1052�ĵ���汾��HMC1051Z�Ǵ�HMC1052�����ĵ��ŵ�·��Ϊ8-pin
SIP��װ��  HMC1052L
����HMC1052�������¿����IJ�Ʒ������һ��оƬ�ϰ������������յĸ�����˫����贫����������ר����Ƶ��ŵ��������������Ĵ�ֱ˫�ᴫ���������Լ���С�ߴ�͵��ģ���һ��16-pin
LCCС�ͱ�����װ�ṹ��
HMC1052L
����HMC1052�������¿����IJ�Ʒ������һ��оƬ�ϰ������������յĸ�����˫����贫����������ר����Ƶ��ŵ��������������Ĵ�ֱ˫�ᴫ���������Լ���С�ߴ�͵��ģ���һ��16-pin
LCCС�ͱ�����װ�ṹ�� Honeywell
HMC1053��һ�ֵ�Ƭ��װ�ĸ����ܵĴ��贫�������������������и߶ȵ����������ȣ����ų�������Χ���Ż��Ľṹ�ͱ�����װ�ķ�װ��ʽ��
Honeywell
HMC1053��һ�ֵ�Ƭ��װ�ĸ����ܵĴ��贫�������������������и߶ȵ����������ȣ����ų�������Χ���Ż��Ľṹ�ͱ�����װ�ķ�װ��ʽ�� HMC1501
���ԡ��ǡ���תλ�ƴ���������8-pin SOIC��װ�������ڲ��������Ĵų��Ƿ��ֱ���<0.07�ȣ��Ƿ�ΧΪ+/-
45�ȡ�
HMC1501
���ԡ��ǡ���תλ�ƴ���������8-pin SOIC��װ�������ڲ��������Ĵų��Ƿ��ֱ���<0.07�ȣ��Ƿ�ΧΪ+/-
45�ȡ� HMC1512
���ԡ��ǡ���תλ�ƴ���������8-pin
SOIC��װ�������ڲ��������Ĵų��Ƿ��ֱ���<0.07�ȣ��Ƿ�ΧΪ+/- 90�ȡ�
HMC1512
���ԡ��ǡ���תλ�ƴ���������8-pin
SOIC��װ�������ڲ��������Ĵų��Ƿ��ֱ���<0.07�ȣ��Ƿ�ΧΪ+/- 90�ȡ� HMC2003
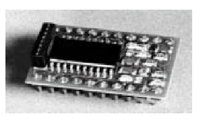
��һ�����������,20-pin
DIP��װ,ģ�������ʹ��HMC1001��HMC1002���ų���Χ+/-2��˹,�ֱ���Ϊ40����˹��
HMC2003
��һ�����������,20-pin
DIP��װ,ģ�������ʹ��HMC1001��HMC1002���ų���Χ+/-2��˹,�ֱ���Ϊ40����˹��
 HMC6042����Ŵ���������ASIC����һ���߾��Ȼ���ź�ASIC,�����������зŴ����ͼ���λ/��λ����,
������һ��Z��(HMC1041Z)�����������Ŵ�����
HMC6042����Ŵ���������ASIC����һ���߾��Ȼ���ź�ASIC,�����������зŴ����ͼ���λ/��λ����,
������һ��Z��(HMC1041Z)�����������Ŵ�����  HMC6352�������ּ������������һ������Ĵ��贫����������в������������ģ������ֵ�·�����ֲ�Ʒ��������ų��������ṩ�˵������̵Ĺ��ܡ�����Ӧ�ð����������̵��ֻ���GPS���̵�����������⣬���߶�λ��
HMC6352�������ּ������������һ������Ĵ��贫����������в������������ģ������ֵ�·�����ֲ�Ʒ��������ų��������ṩ�˵������̵Ĺ��ܡ�����Ӧ�ð����������̵��ֻ���GPS���̵�����������⣬���߶�λ��












 HMR2300 �������ִ�����
HMR2300 �������ִ����� HMR2300r �������ʽ������
HMR2300r �������ʽ������ HMR3000 ��������ģ��
HMR3000 ��������ģ��
 ����Τ����HMR3200/HMR3300�����ڵ������Ƶ�ϵͳ�ĵ������̽������ģ�顣����Τ���Ĵ��贫����������HMR3200/HMR3300�ԴﵽС�ߴ磬��̬���̵Ŀɿ��Ժ;��ȡ�HMR3200/HMR3300���dz����ڼ��ɵ�ʹ��ASCII��ʽ��UART��SPI�ӿڵ�ϵͳ�С�HMR3300��������ų�������������������ٶȴ�������Ϊ��Dz������Ӷ�ʹ��Dz�����Χ�ﵽ��
60�㡣HMR3200 ���������ģ�飬�ڴ�ֱ��ˮƽ��������ܱ��Ż���
����Τ����HMR3200/HMR3300�����ڵ������Ƶ�ϵͳ�ĵ������̽������ģ�顣����Τ���Ĵ��贫����������HMR3200/HMR3300�ԴﵽС�ߴ磬��̬���̵Ŀɿ��Ժ;��ȡ�HMR3200/HMR3300���dz����ڼ��ɵ�ʹ��ASCII��ʽ��UART��SPI�ӿڵ�ϵͳ�С�HMR3300��������ų�������������������ٶȴ�������Ϊ��Dz������Ӷ�ʹ��Dz�����Χ�ﵽ��
60�㡣HMR3200 ���������ģ�飬�ڴ�ֱ��ˮƽ��������ܱ��Ż��� HMR3400 ������б������������
HMR3400 ������б������������ HHMR3500�������������ֵ�������
HHMR3500�������������ֵ������� HG1171���Բ�����Ԫ(IMU)
HG1171���Բ�����Ԫ(IMU)